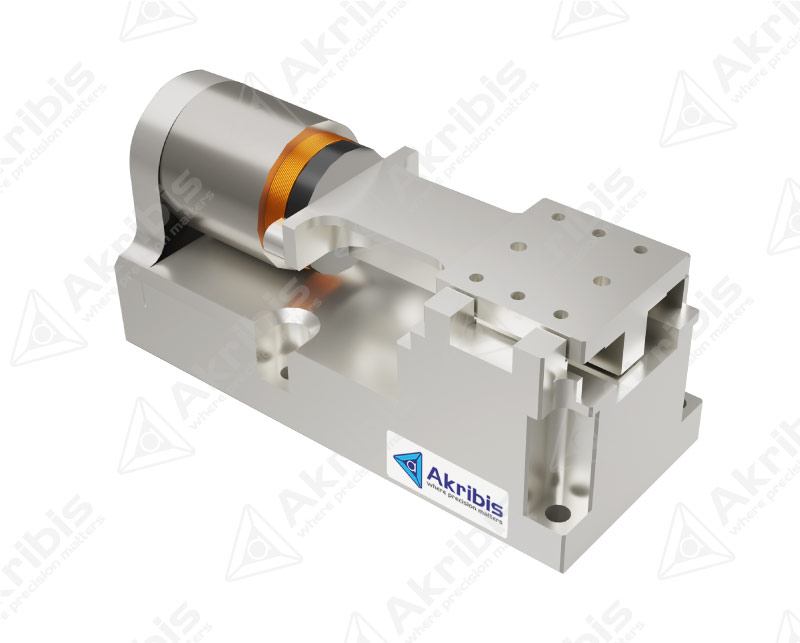
设计特点
A. 直接驱动
B. 无嵌齿效应,无背隙,无铁芯的直线执行机构
C. 行程从15mm到30mm
D. 适用于高速、高加速应用
E. 在低速下可平滑运行(速度波动小)
F. 采用交叉滚子导轨,高刚性
| 电机参数 | 单位 | XMGV30 | XMGV40 | XMGV60 | XMGV90 | ||||
| 电机型号 | - | AVM30-15 | AVM40-20 | AVM60-25 | AVM90-30 | ||||
| 持续推力(自冷) @100ºC①② | N | 4.43 | 10.5 | 26.8 | 95.6 | ||||
| 峰值推力② | N | 28.2 | 61.7 | 121.6 | 340.3 | ||||
| 力常数 ±10%② | N/A | 7.03 | 13.6 | 17.3 | 23.9 | ||||
| 反电势常数 ±10%② | Vpeak/(m/s) | 7.03 | 13.6 | 17.3 | 23.9 | ||||
| 电阻 @25ºC ±10%③ | Ω | 10.24 | 11.5 | 5.35 | 2.73 | ||||
| 电感 ±20%④ | mH | 2.82 | 5.2 | 3.82 | 3.80 | ||||
| 持续电流(自冷) @100ºC① | A | 0.6 | 0.8 | 1.6 | 4.0 | ||||
| 峰值电流 | A | 4.0 | 4.5 | 7.0 | 14.0 | ||||
| 最高电压 | Vdc | 60 | 60 | 60 | 120 | ||||
| 机械参数 | 单位 | XMGV30 | XMGV40 | XMGV60 | XMGV90 | ||||
| 精度等级 | - | P | N | P | N | P | N | P | N |
| 行程⑤ | mm | 15 | 20 | 25 | 30 | ||||
| 分辨率 | μm | SINCOS/0.05 | 0.2 | SINCOS/0.05 | 0.2 | SINCOS/0.05 | 0.2 | SINCOS/0.05 | 0.2 |
| 重复定位精度 | μm | ±0.5 | ±1.0 | ±0.5 | ±1.0 | ±0.5 | ±1.0 | ±0.5 | ±1.0 |
| 水平直线度 | μm | ±2.5 | ±2.5 | ±2.5 | ±2.5 | ||||
| 垂直直线度 | μm | ±2.5 | ±2.5 | ±2.5 | ±2.5 | ||||
| 额定负载⑥ | kg | 0.6 | 1.5 | 4.0 | 14.0 | ||||
| 空载运动质量 | kg | 0.14 | 0.20 | 0.45 | 1.63 | ||||
| 空载总质量 | kg | 0.51 | 0.80 | 1.90 | 5.31 | ||||
| 最大静态力矩 | Nm | 0.8 | 1.4 | 3.4 | 16.0 | ||||
注:
①测量环境温度为25°C,数值取决于热环境。
②行程中点处的值。
③电阻测量采用直流电流,含0.5米标准线缆。
④电电感测量频率1kHZ。
⑤行程的定义根据防撞块至防撞块,即机械行程。限位传感器的位置距离防撞块0.5mm。
⑥在此负载下,平台可以提供不少于1G的加速度。
相关参数规格如有变动,恕不另行通知。
XMGV30

XMGV40

XMGV60

XMGV90