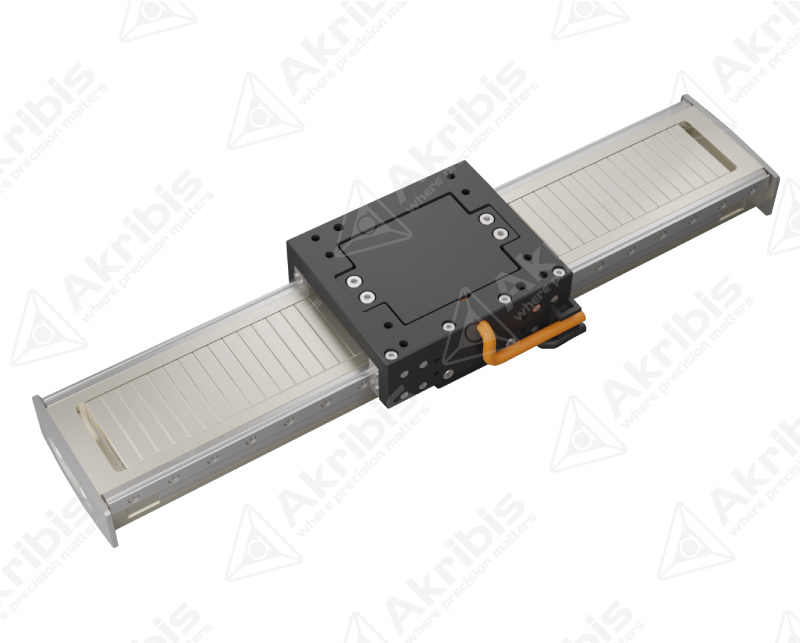
设计特点
A. 紧凑型设计
B. 直驱技术
C. 无齿槽扭矩
D. 高精度光学编码器
E. 可叠加使用
典型应用领域:适用于高精度旋转校正定位、光学对位平台。
| 电机参数 | 单位 | AMR65 | AMR80 | ||
| 电机型号 | - | AMR65D-50 | AMR80D-100 | ||
| 持续转矩(自冷) @100°C① | Nm | 0.13 | 0.2 | ||
| 峰值转矩 | Nm | 0.51 | 0.79 | ||
| 转矩常数 ±10% | Nm/Arms | 0.12 | 0.2 | ||
| 反电势常数 ±10% | Vpeak/rpm | 1.00E-02 | 1.69E-02 | ||
| 相间电阻 @25°C ±10%② | Ω | 8 | 9.3 | ||
| 相间电感 ±20%③ | mH | 0.75 | 1 | ||
| 持续电流(自冷) @100°C① | Arms | 1.1 | 1 | ||
| 峰值电流 | Arms | 4.4 | 4 | ||
| 最高母线电压 | Vdc | 48 | 48 | ||
| 极数 | - | 16 | 16 | ||
| 机械参数 | 单位 | AMR65 | AMR80 | ||
| 精度等级 | - | P | N | P | N |
| 有效行程 | degree | 50 | 100 | ||
| 分辨率 | μm | SINCOS/0.05 | 0.2 | SINCOS/0.05 | 0.2 |
| 重复定位精度 | arc sec | ±0.5 | ±0.5 | ±0.5 | ±0.5 |
| 最大转速 | degree/s | 720 | 720 | ||
| 转子惯量 | kg·m2 | 0.00014 | 0.00016 | ||
| 空载总质量 | kg | 0.52 | 1.1 | ||
| 最大静态轴向负载 | N | 30 | 60 | ||
| 最大静态力矩 | Nm | 0.84 | 2.0 | ||
注:
①测量环境温度为25℃,数值取决于热环境。NC=自然冷却,AC=风冷,WC=水冷。
②电阻测量采用直流电流,含0.5米标准线缆。
③电感是通过1kHZ的电流频率来测量的。
相关参数规格如有变动,恕不另行通知。
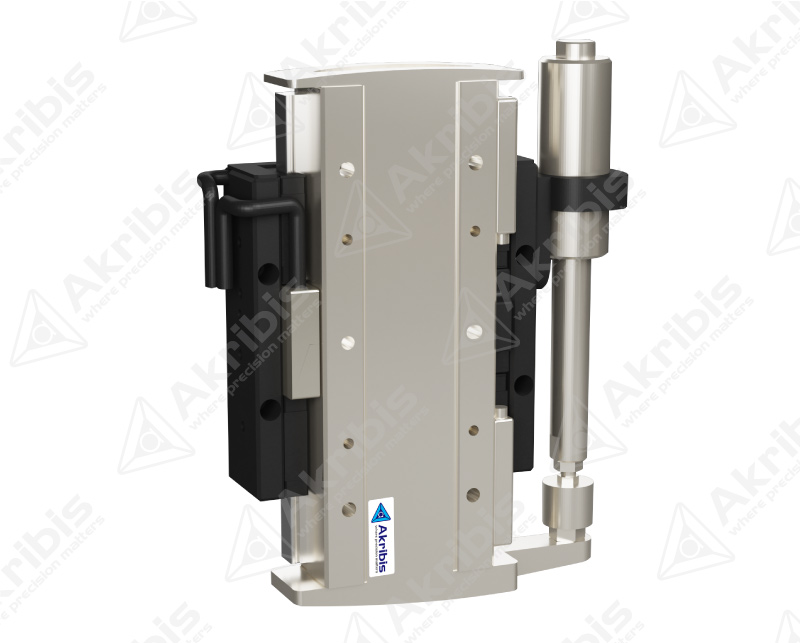
AMR65-50


AMR80-100